
大家好,我是来自银基Tiger Team的BaCde。本文主要是通过ICSim(Instrument Cluster Simulator)模拟CAN协议通信,通过实践对CAN总线协议进行逆向分析。在实践过程中踩过一些坑,这里跟大家分享交流。
简介
CAN(Controller Area Network)总线是制造业和汽车产业中使用的一种简单协议,为ISO国际标准化的串行通信协议。在现代汽车中的小型嵌入式系统和ECU能够使用CAN协议进行通信,其通信是采用的广播机制,与TCP协议中的UDP差不多。各个系统或ECU(电子控制单元)都可以收发控制消息。1996年起该协议成了美国轿车和轻型卡车的标准协议之一,但是直到2008年才成为强制标准(2001年成为欧洲汽车标准)。当然1996年之前的也有可能使用CAN总线。现在,汽车的电子组件均通过CAN总线连接,针对汽车的攻击最终也都会通过CAN总线来实现。对于研究汽车安全,CAN总线协议是必须要掌握的。
环境与准备
- CAN总线模拟—ICSim
- 分析工具— can-utils、Kayak、Wireshark
- 系统—Kali Linux 2020 语言为中文(非root权限)
ICSim编译
ICSim(Instrument Cluster Simulator),是由Open Garages推出的工具。它可以产生多个CAN信号,同时会产生许多背景噪声,让我们可以在没有汽车或不改造汽车的情况下即可练习CAN总线的逆向技术。
GITHUB地址:https://github.com/zombieCraig/ICSim
ICSim目前仅可运行在linux系统下,在Kali linux上按照github提供的安装方法,会出现“libsdl2-dev 未满足的依赖关系”的错误,错误如下图。

可以通过aptitude安装来解决,具体安装步骤如下:
sudo apt-get update
sudo apt-get install aptitude
sudo aptitude install libibus-1.0-dev
sudo apt-get install gcc
git clone https://github.com/zombieCraig/ICSim
cd ICSim
make
至此ICSim安装完成,目录内容如下:

切换到ICSim目录,执行如下命令。
./setup_vcan.sh #初始化,每次重启后都要重新运行
./icsim vcan0 #模拟器
./controls vcan0 #控制面
运行后可以看到如下界面,像游戏手柄的界面是控制面板(这里可以插入USB游戏手柄进行控制,笔者这里没有,有USB手柄的大家可自行测试)。另外有仪表盘的窗口是模拟器,速度表停在略高于0mph的位置,如果指针有摆动就说明ICSim工作正常。

其控制器的按键说明如下:
| 功能 | 按键 |
|---|---|
| 加速 | 上方向键 |
| 左转向 | 左方向键 |
| 右转向 | 右方向键 |
| 开/关左车门(前)锁 | 右/左shift+A |
| 开/关右车门(前)锁 | 右/左shift+B |
| 开/关左车门(后)锁 | 右/左shift+X |
| 开/关右车门(后)锁 | 右/左shift+Y |
| 开启所有车门锁 | 右shift+左shift |
| 关闭所有车门锁 | 左shift+右shift |
上面的setup_vcan.sh 主要功能是加载CAN和vCAN(virtual controller area network)网络模块。并创建名为vcan0的网络设备并打开连接。setup_vcan.sh文件内容如下:
sudo modprobe can
sudo modprobe vcan
sudo ip link add dev vcan0 type vcan
sudo ip link set up vcan0
运行后,我们可以使用ifconfig来查看网络接口,发现会多出来一个vcan0的网络接口。

can-utils安装
can-utils是CAN实用的工具套件,包含了许多实用程序。
GITHUB地址:https://github.com/linux-can/can-utils
经常用到的几个程序如下,更多命令可以看github地址:
- candump : 显示、过滤和记录CAN数据到文件。candump并不会解码数据。
- canplayer : 对记录的CAN数据进行重放。
- cansend : 发送CAN数据。
- cansniffer : 显示CAN数据并高亮显示变化的字节。
当前环境使用的Kali Linux 2020直接使用如下命令安装即可。如果你的系统不支持,则可以直接下载github上的源码,使用make命令进行编译安装。
sudo apt-get install can-utils
Kayak
Kayak可以直接通过github下载release版本的。但是,该工具的使用需要配合socketcand。
- socketcand安装
sudo apt install automake git clone https://github.com/linux-can/socketcand.git cd socketcand ./autogen.sh ./configure make sudo make install - Kayak下载
GITHUB下载:https://github.com/dschanoeh/Kayak/releases
解压缩后,bin文件夹下有windows版本和linux的运行程序。Kali下直接在terminal下运行./kayak 即可。当然这里也可以下载源代码,并使用maven编译。
前置知识
上面已经准备好了环境,在真正开始分析之前,先简单说一些前置知识。
CAN总线
- CAN运行在两条线路上:CAN高电平(CANHI)和CAN低电平(CANLO)。
- CAN bus 有四种帧类型
| 帧类型 | 用途 |
|---|---|
| 数据帧(Data Frame) | 包含要传输的节点数据的帧 |
| 远程帧(Remote Frame) | 请求传输特定标识符的帧 |
| 错误帧(Remote Frame) | 任何检测到错误的节点发送的帧 |
| 重载帧(Overload Frame) | 在数据或远程帧之间插入延迟的帧 |
- CAN有两种类型的消息(帧)格式:标准(基础)帧格式和扩展帧格式。标准(基础)帧有11位标识符,扩展帧格式有29位标识符。CAN标准帧格式和CAN扩展帧格式之间的区别是通过使用IDE位进行的,IDE位在11位帧的情况下以显性方式传输,而在29位帧的情况下以隐性方式进行传输。支持扩展帧格式消息的CAN控制器也能够以CAN基本帧格式发送和接收消息。
- 标准帧格式
说一下主要的4个元素,其他的大家感兴趣可自行去了解:- 仲裁ID(Arbitration ID):仲裁ID是一种广播消息,用来识别正视图通信的设备的ID,其实也代表发送消息的地址。任何的设备都可以发送多个仲裁ID。在总线中同时发送的消息,低仲裁ID的消息拥有优先权。
- 标识符扩展(IDE):标准帧格式该位始终是0。
- 数据长度码(DLC):表示数据的大小,番位是0字节到8字节。
- 数据(Data):总线传输数据本身。一个标准的数据帧可携带最大尺寸为8字节。有些系统中会强制要求8字节,不满8字节则填充为8字节。

- 扩展帧格式
扩展帧格式与标准帧格式类似,扩展帧格式可以连接在一起,形成更长的ID。拓展帧格式可包含标准帧格式。拓展帧格式的标识符扩展IDE被设置为1。扩展帧有一个18位的标识符,是标准的11位标识符的第二部分。
CAN总线威胁
根据CAN总线的特性,我们则可以了解CAN面临的威胁:
- CAN总线通信是广播的方式,所以数据是可以被监听和获取的。
- CAN总线协议中ID代表报文优先级,协议中没有原始地址信息。也就是说任何人都可以伪造和发送虚假或恶意的报文。
另外拒绝服务攻击在CAN总线协议中也是存在的。但是我们主要是分析和逆向CAN总线。这里不做相关说明。
监听CAN流量
监听CAN流量有多种方法。首先请保证启动ICSim。
- can-utils 工具包监听
candump -l vcan0输入该命令后会监听流量并以candump-YYYY-MM-DD_time.log格式的文件名保存到当前目录下。如candump-2020-06-22_103240.log。按ctrl+c停止监听。
打开文件,数据格式如下:(1592836523.941032) vcan0 164#0000C01AA8000022 (1592836523.941168) vcan0 17C#0000000010000003 (1592836523.941285) vcan0 18E#00004D (1592836523.941387) vcan0 1CF#80050000000F (1592836523.941745) vcan0 1DC#0200000C (1592836523.943317) vcan0 183#0000000E0000100D (1592836523.943545) vcan0 143#6B6B00C2括号内的是时间戳,vcan0为我们的虚拟can接口。后面的是ID和数据,ID和数据以#号分割。

也可以去掉-l选项,直接在屏幕上可以打印数据包。
candump是监听并记录原始数据,会有很多对我们无用的数据。can-utils工具包中还有一款可以根据仲裁ID进行分组显示,并对变化的数据以红色显示,它就是cansniffer。
命令:
cansniffer -c vcan0

cansniffer可以通过发送按键来过滤显示数据包。注意,当输入按键时,并不会在终端中显示,输入完成后按回车键(一定要记得按)。如下例子则是先关闭所有数据包显示(-000000),然后仅显示ID133和ID244的数据包。
-000000
+133
+244
- Wireshark 监听
wireshark功能简直太强大了,它也可以捕获CAN数据报文。打开wireshark,选择vcan0接口即可监听流量。info列中可以看到ID和数据。wireshark也是原始流量,并为进行去重。
- Kayak监听
- 运行socketcand -i vcan0,socketcand可以挂接多个CAN设备,接口名使用逗号分割即可。
- 然后切换到Kayak的bin目录下,运行./kayak。
- 单击File菜单->new project(或者ctrl+n快捷键),输入project名字。
- 展开右下角connections窗口中的auto discovery,将下面的内容拖到新建的project中并输入一个名字。
- 右键上一步中创建的bus,选择OPEN Raw View。
- 单击工具栏中的play 按钮。开始捕获CAN总线流量。点击colorize可以对有变化的数据以不同颜色。同时还可以暂停和停止监听流量操作。



candump和wireshark监听的流量都是原始流量,我们看到的数据非常多。而Kayak可以按照仲裁ID来进行分组显示,并对不同的
重放CAN流量
canplayer程序可以重放candump记录的流量内容。
输入如下命令即可重放。
canplayer -i candump的log文件
重放时,可以观察下ICSim仪表盘是否有变化。
对于CAN分析的工具不仅只有这几个,也可以多尝试其他网络上的工具。
CAN消息逆向
在实战中,各个制造商和车型都有自己唯一的CAN数据包格式,而分析通信数据主要是目的是找到某个特定的信号,例如开车门锁,启动车等。通过上面监听数据,可以看到会有很多数据,这主要由于汽车本身会有很多设备会按照制定的间隔发送数据,这些数据可以称为噪音,这对分析某个具体动作带来麻烦。所以需要对CAN消息进行逆向分析。
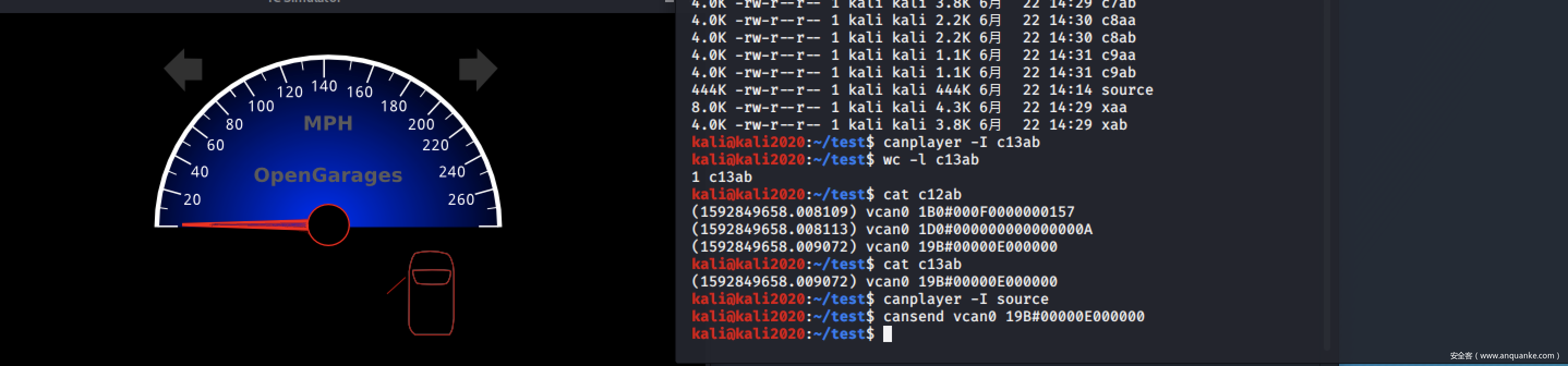
二分法
- 首先通过candump监听数据。
candump -l vcan0 - 回到控制器界面,进行开门锁操作,然后在关闭车门锁。
- 停止监听数据。数据保存到执行
mv candump-2020-06-22_140718.log source(文件名根据实际情况修改) - 关车门锁操作,执行
canplayer -I source重放数据。确认车门锁是否开启。如果没有,请重复上面的步骤。 - 输入
wc -l source命令查看文件行数。笔者这里结果为11407行。 - 输入
split -l 6000 source c1将source文件分成两个文件。 - 使用canplayer重放两个分割后的文件,查看重放的哪个文件打开来车门锁。每次重放前都要执行
canplayer -I source。主要是保证每次重放分割的文件前车门锁是关闭的。 - 根据第6和7的步骤对包含重放命令的文件进行。这里要注意每次split命令分割的行数减少1倍。例如第二次执行的名为
split -l 3000 c1aa c2。重放命令为canplayer -I c2aa和canplayer -I c2ab。这样一直重复知道发现最终的数据包。
经过上面的重复,在13ab的文件中定位到来了ID值和发送的数据。使用 cansend vcan0 19B#00000E000000 进行验证。打开车门锁成功。
统计法
对于一些只有在进行操作时才会产生的动作,可以通过选择特定的次数,对其发送的次数进行筛选。
- 使用
candump -l vcan0捕获数据包。 - 在控制器界面中操作5次车门锁操作。
- 停止candump。获得保存文件,这里为
candump-2020-06-22_151059.log。 - 通过编写好的脚本,运行
python3 can.py candump-2020-06-22_151059.log获得结果

脚本很简单,主要就是遍历所有数据,对ID进行计数统计并显示最终结果,输入ID值可显示对应的数据内容。使用python 20行代码就可以搞定。大家可以自己编写下。
观察法
有了上面的一些经验积累后,借助可视化界面来对数据进行观察也可以逆向出其总线ID。
按照上面启动Kayak的方法,启动监听数据。工具已经对ID进行来分组。将模拟器,控制器和Kayak放在同一个屏幕上。

在控制器界面按下左键,模拟器界面左转向灯闪了一下,观察Kayak界面数据变化,在左转向灯闪时(也就是按下左键时),看哪一个值变了又变会原值,并保持原值。最终定位ID值为188。
现在在进行另外一个例子,在汽车加速过程中,转速表是一直在上升。这就可以通过观察哪一个值是在持续上升的。这里通过控制器界面,按住上方向键,观察哪一个值是在持续增加的。最终定位ID值为244。
可以通过cansend来进行验证,是否成功。
当然除了使用Kayak外,也可以尝试cansniffer。
ICSim难度设置
以上介绍的几种方法各有利弊,不能满足所有情况,实际的情况会非常复杂,需根据实际情况进行选择。
对于CAN总线的分析,ICSim支持从0到3的4个级别,默认难度为1级,0为最简单,3是最难。还可以设置随机化的种子值。
输入 ./icsim -r vcan0 命令可以显示出随机的种子值。当然也可以使用 ./icsim -s 1419525411 vcan0 来设置种子值,这样仿真器就可以选择不同的ID和目标字节位置了。
输入 ./icsim -l 3 vcan0 命令设置挑战难度。
大家可以自行尝试增加难度来进行挑战。
总结
本文主要以ICSim模拟CAN总线数据,通过多种方式来对CAN总线进行逆向分析,重在方法和工具使用。部分内容并未过多提及,如果一旦拓展开来,需要写的内容实在太多。感兴趣的大家可自行进行深入学习和了解。如果在进行实车的分析和测试也要注意自身安全,提前做好计划和保障。
参考或引用来源
- https://github.com/zombieCraig/ICSim
- https://github.com/linux-can/can-utils
- https://github.com/dschanoeh/Kayak/releases
- https://tryhackme.com/room/carhacking101
- https://www.securitynewspaper.com/2018/05/03/hack-car-tool/
- https://github.com/jaredthecoder/awesome-vehicle-security#python
- https://dschanoeh.github.io/Kayak/tutorial.html
- https://www.hackers-arise.com/post/2017/08/08/automobile-hacking-part-2-the-can-utils-or-socketcan
- https://www.hackers-arise.com/post/2017/08/04/automobile-hacking-part-1-the-can-protocol
- https://en.wikipedia.org/wiki/CAN_bus
- https://mp.weixin.qq.com/s/jvzLn2ZTmId4cfqBNJxYyg
参考书籍或文档
- 《智能网联汽车安全》
- 《汽车黑客大曝光》
- 《Car Hacking: Accessing and Exploiting the CAN Bus Protocol》







发表评论
您还未登录,请先登录。
登录