

由于原文冗长,本文是我在阅读文章思考后选取的一部分重点内容摘要。
硬件综述
功能简介
从用户的角度来看,我的STB/网关具有以下常用功能:
- 电视和宽带互联网可通过Cable获得。
- 它作为家用的网关,可以连接到以太网和WiFi, WPA2是默认启用的。
- 它也可以作为机顶盒使用,并可以连接到电视。由于附带的遥控器,可以控制此STB。
我们首先来看一下STB/网关和它的远程控制功能。我网购了很多这样的元件,把他们拆开。![Alt text]()
这个STB/网关由三个主要的PCB组成。
不出意料的,有一个是负责网关功能的,另一个作为STB。最后一个包含了一个屏幕和一堆按钮,用于用户的交互。
我费了点时间研究他们的工作、通讯机制。我接下来讲一下这个机制,也让你了解一下本文的主要内容。

网关板
我们不会在这个上做很多事情,而且我也没有花太多时间研究它。
大部分电路板的组件都被封装在焊接金属板的壳里,我不想拆。 主处理器是隐藏的,WiFi模块也是。 对于好奇的读者,我仍然注释了以下图片。(译者注:对标注过的图片上元件不清楚的话,请参阅原文的图片,作者标注非常详细)
( )
)
和STB相连的是这块小电路板:
这些线路传送了电和各种信号。 STB板和网关板之间的主要通信总线似乎是以太网。 其他通信总线似乎包括UART和一些GPIO。
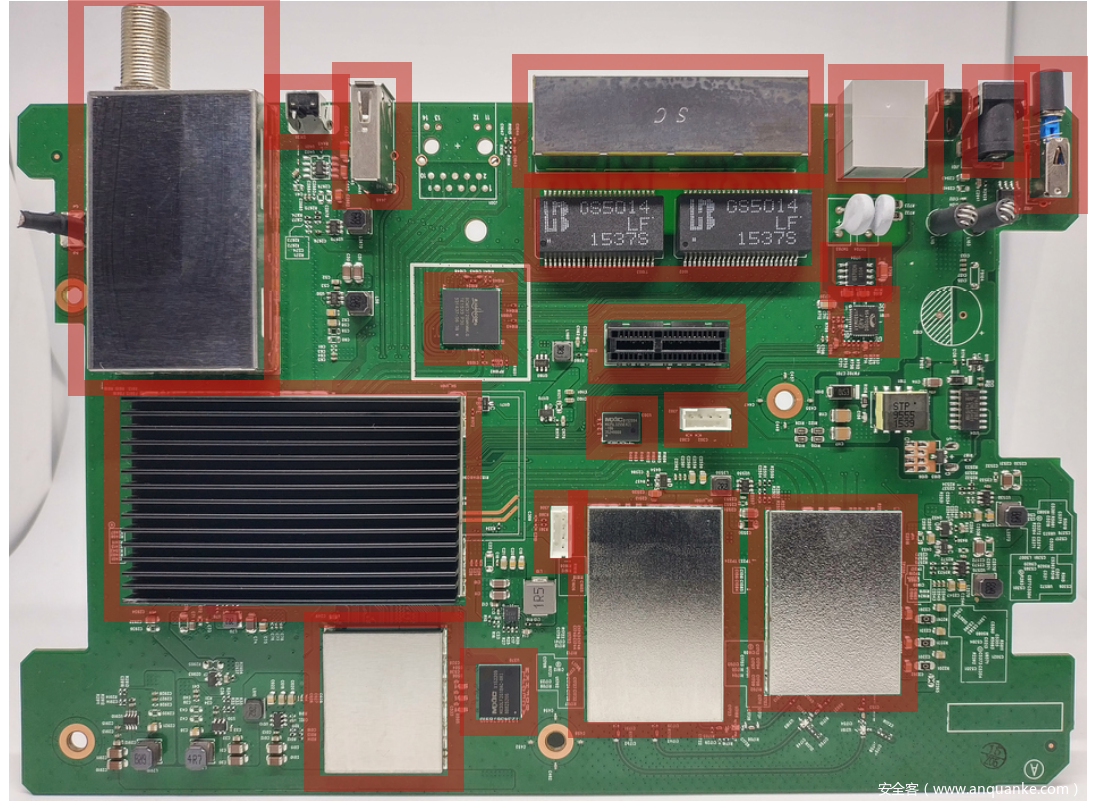
STB板
在本文的范围内,STB部分将会更加有趣。
如以下带注释的图片所示,电路板的正面主要装有大型处理器和一些RAM。
这些图片描述了最近的硬件版本。
主CPU是Broadcom的BCM7252。 网上的资料不多,但根据一些新闻稿,它被描述为“高性能双核Brahma15 10.5K DMIPS CPU”。 Brahma15似乎实际上接近Cortex A15架构,并且与ARMv7指令集兼容。
有趣的是,一些以前版本的电路板使用了x86处理器。
在底部,可以找到三个有趣的组件:
- 一个eMMC
- PIC单片机,PIC16F1527
- 一个RF远程通信集成电路CC2534
![]()
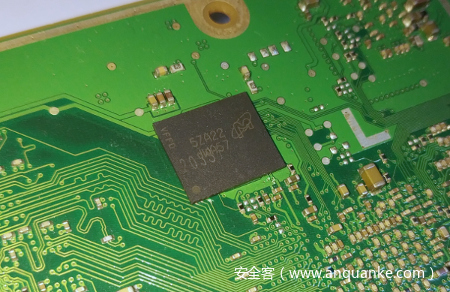
在这样的电路板上找到eMMC并不意外。 它包含STB的固件。 尽管这样,寻找PIC微控制器和RF集成电路会更惊人。
PIC微控制器
PIC16F1527是一款小型8位微控制器,包装在一个64针脚的TQFP中。
这个PIC的定位,称为“MCU”(微控制器单元),处理一堆简单和低级别的功能。
例如,MCU负责:
- 处理UI板的按钮(下一节中的更多内容)
- 处理UI板的屏幕
- 与RF电路通信
MCU与主STB CPU进行通信,将其称为“MPU”(用于微处理器单元),通过两条UART总线和网关板通信。
例如,当按下UI板上的一个按钮时,MCU将向MPU或网关发送几个字节(取决于哪一个被按下)来通知它该按钮已被按下。
另外一个例子,如果MPU需要更新UI板的屏幕,它将通过向MCU发送命令来完成。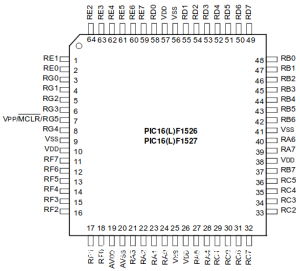
幸好我在网上找到了PIC16F1527的资料表。
RF集成电路
CC2534的数据表还未公开。尽管如此,这个似乎是与CC2533引脚兼容的,并且似乎具有相似的特征。
因此,该IC符合其制造商Texas Instrument的“用于2.4GHz IEEE 802.15.4和ZigBee应用的True System-on-Chip解决方案”。该IC用于与遥控器进行通信。
这种遥控器其实不单单使用传统的红外LED与STB进行通信。 IR通信也会在设备安装期间使用。配对后,使用称为“Zigbee RF4CE”的2.4-GHz无线电协议。
“Zigbee RF4CE规格为基于Zigbee远程控制和Zigbee输入控制的设备产品提供了即时,低成本,易于实施的网络解决方案。 Zigbee RF4CE规范旨在为广泛的产品提供低功耗,低延迟的控制,包括家庭娱乐设备,车库开门器,无钥匙进入系统等等。http://www.zigbee.org/zigbee-for-developers/network-specifications/zigbeerf4ce/**”**
CC2534通过SPI总线与MCU通信。因此,遥控器发送的按键首先由RF电路接收,然后由MCU接收,最后由MPU接收。
UI板
该电路板包含以下组件:
- 显示系统状态的屏幕
- 三个按钮。
按下按钮将执行以下操作: - 按钮1:WiFi。 用于启用或禁用WiFi。
- 按钮2:WPS。 按下此按钮将允许设备连接到WiFi网络,而不需要WPA2密钥。 此功能默认启用。
按钮3:电源。 用于开启和关闭STB。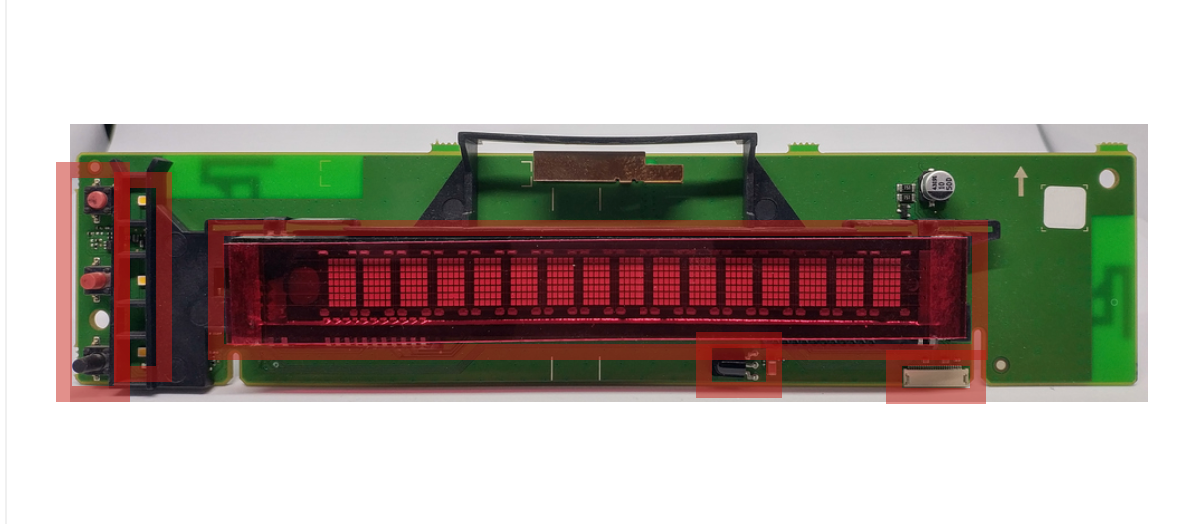
正如前文所言,屏幕和按钮都直接连到这些负责处理外部设备的MCU上。
远程功能
遥控器的内部揭示了两个主要的集成电路:其中一个是我没去玩的微控制器,另一个是另一个CC2534。CC2534和STB板上焊接一个部件的通信。
如下面所注释的图片所示,主板的一侧包含这些组件,另一侧则全都是触摸式金属圆片开关。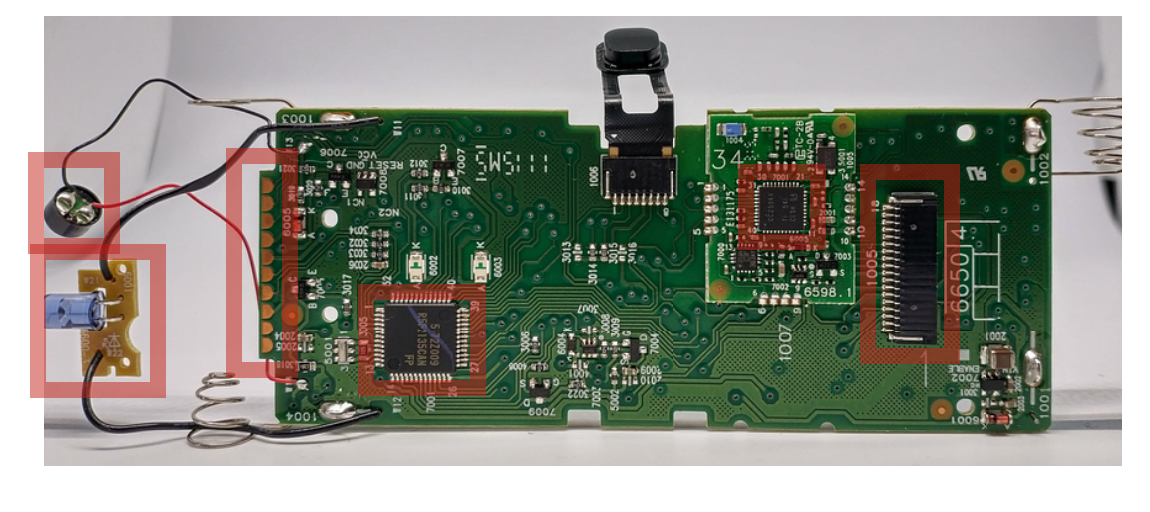
架构总结
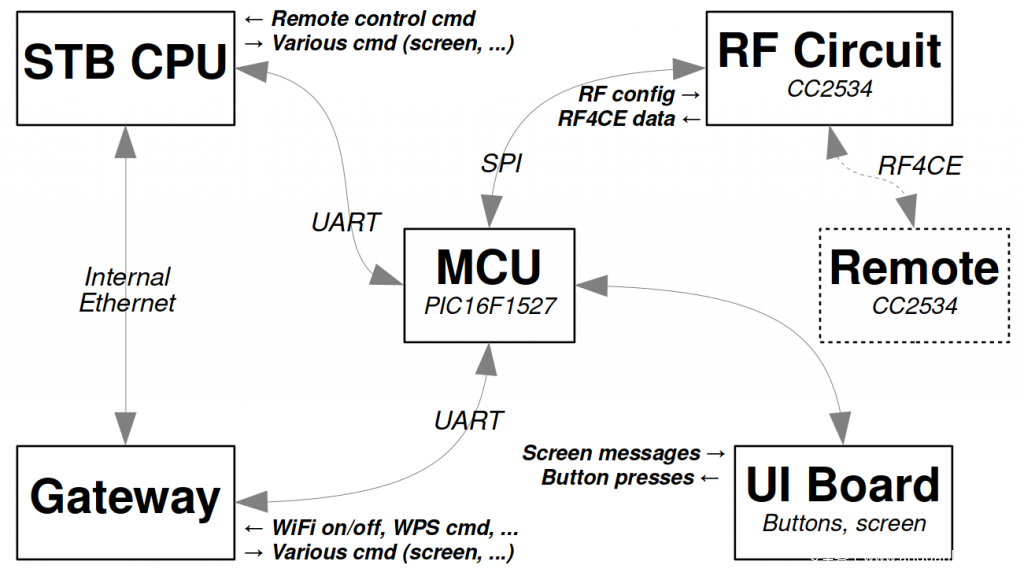
对本文其余部分有用的关键点如下:
- PIC处理用户界面。 它通过两个不同的UART总线与网关板和STB板通信。
- PIC通过SPI总线与RF集成电路CC2534进行通信。
- STB板的CC2534与遥控器的CC2534通信。 所使用的无线电协议是“Zigbee RF4CE”。
现在可以理解体系结构,我们讨论在系统上运行的软件, 是时候dump一些固件了。
逆向工程
eMMC固件提取
用热风枪拆下,看到很多引脚,这里用的是153引脚的。我买了一个读153和169脚eMMC固件的设备,dump后分解SquashFS,是一个linux root的文件系统。
PIC固件提取
因为这里加了保护所以不能直接从PIC的flash读,但是eMMC可以flash PIC的固件,所以只要从上面提出来的固件里找。
反汇编分析
(译者注:用IDA自带的PIC16xx指令集分析即可)我自己给radare2加上了PIC的支持
不破坏设备的固件dump
每个设备都不太一样,我想到了用USB接口去拦截、篡改数据,触发一个远程升级,下载到固件。
PIC bootloader的dump
先要知道内存在flash上的布局,我要知道我想要的东西在哪?我反编译到0x200的时候,代码开始有意义了,所以0x200之前是bootloader(译者注:其实不用这么麻烦,查手册很快就能搞定)。
| Range | Type |
|---|---|
| 0x0000 – 0x01FF | Bootloader |
| 0x0200 – 0x3FFF | Main Code |
我为了dump bootloader,如下图连接。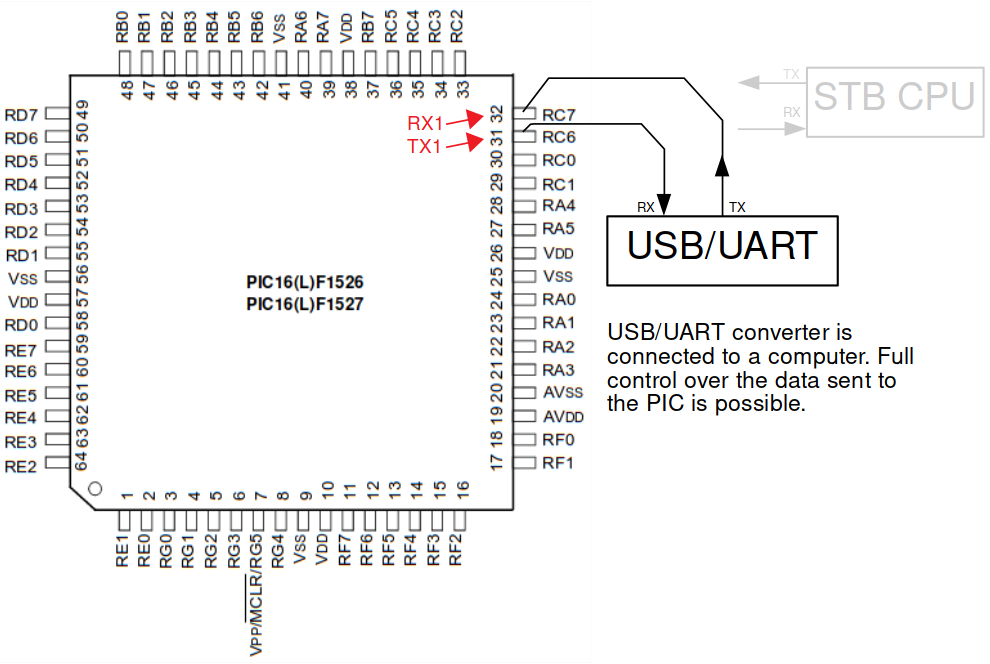
我最初遇到了困难,觉得像是用了哪种校验,举个两个栗子:
0x00003df0 0800 return
0x00003df2 2100 movlb 0x1
0x00003df4 0430 movlw 0x4
0x00003df6 c901 clr 0x49, f
0x00003df8 2000 movlb 0x0
0x00003dfa c100 movwf 0x41
0x00003dfc 0800 return
0x00003dfe 5600 invalid ; "These bytes do not decode to a valid instruction"
0x00003e00 ffff invalid
0x00003e02 ffff invalid
0x00003e04 ffff invalid
0x00003e06 ffff invalid
0x00007dae ed01 clr 0x6d, f
0x00007db0 dc2f goto 0x7dc
0x00007db2 0230 movlw 0x2
0x00007db4 2100 movlb 0x1
0x00007db6 ed00 movwf 0x6d
0x00007db8 2000 movlb 0x0
0x00007dba 5514 bsf 0x55, 0
0x00007dbc 0800 return
0x00007dbe 8700 movwf 0x7 ; "Weird instruction to end and image. The return just above makes more sense"
0x00007dc0 ffff invalid
0x00007dc2 ffff invalid
0x00007dc4 ffff invalid
果然是这样的,我最后确定这就是和0x51异或校验的。于是我重新写了一下。
include <p16f1527.inc>
DUMP_CODE CODE 0x38C0
MOVLB 0x03
BCF PMCON1, CFGS
CLRF 0x70
CLRF 0x71
; Loop through the bootloader data
loop:
MOVFW 0x70
MOVWF PMADRL ; Store LSB of address
MOVFW 0x71
MOVWF PMADRH ; Store MSB of address
BSF PMCON1, RD ; Initiate read
NOP ; Ignored
NOP ; Ignored
MOVFW PMDATL
MOVWF TX1REG
busy_loop_2:
BTFSS TX1STA, 1
GOTO busy_loop_2
MOVFW PMDATH
MOVWF TX1REG
busy_loop_3:
BTFSS TX1STA, 1
GOTO busy_loop_3
INCF 0x70, f
SKPNZ
INCF 0x71, f
MOVFW 0x71
XORLW 0x20
SKPNZ
GOTO resume
GOTO loop
; Use to continue the normal
; firmware execution safely
resume:
MOVLB 0x2
BSF 0xC, 3
BSF 0xF, 0
RETURN
END
远程/STB RF 连接
简介
之前讲如何拿下固件,接下来我们研究如何远程攻击,这里用到了ZigBee,是我们主要的研究对象。
RF4CE专为远程控制应用而设计,用于低速传输少量数据。
它位于由IEEE 802.15.4定义的物理层(PHY)和媒体访问控制(MAC)层之上。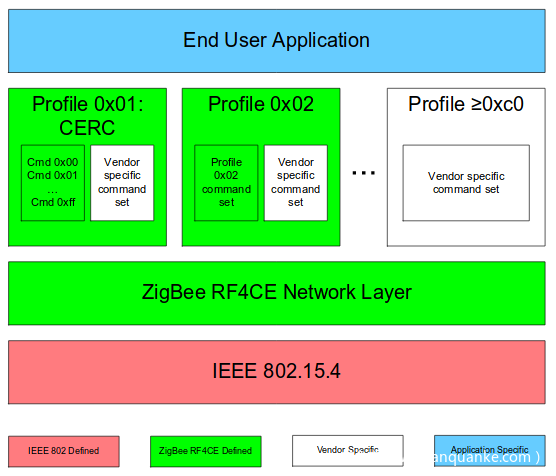
- PHY层
数据在2.4GHz ISM频段上传输。
RF4CE仅使用16个2.4GHz可能的Zigbee通道中的3个通道。 使用的频道是分别对应于2425MHz,2450MHz和2475MHz频率的频道15,20和25。
使用的调制是O-QPSK。 使用DSSS可以提高噪声免疫力。 - MAC层
Zigbee数据包的一般结构如下。
| SIZE (BYTES) | 2 | 1 | 0 or 2 | 0, 2 or 8 | 0 or 2 | 0, 2 or 8 | * | 2 |
|---|---|---|---|---|---|---|---|---|
| FIELD | Frame Control | Sequence Number | Destination PAN | Destination Address | Source PAN | SourceAddress | Payload | Checksum |
具体而言,帧控制由以下字段组成:
| BIT INDEX | 0-2 | 3 | 4 | 5 | 6 | 7-9 | 10-11 | 12-13 | 14-15 |
|---|---|---|---|---|---|---|---|---|---|
| FIELD | Frame Type | Security Enable | Frame Pending | ACK | Intra PAN | Reserved | Destination Addressing Mode | Reserved | Source Addressing Mode |
- 帧控制,位10-11和14-15:不同的寻址模式可用于源和目标。 长寻址模式意味着源地址或目标地址将由8个字节组成,而短寻址意味着将只使用两个字节。
- PAN代表个人区域网络, 这个概念是特定于Zigbee的。Zigbee节点只允许从同一个PAN发送数据到一个节点。
- 在我们的例子中,帧有效载荷将包含RF4CE层。
AES-128-CCM *是CCM操作模式的衍生产品,并使用AES作为分组密码。 密钥长度为128位。
这个密钥在配对过程中在两个设备之间交换。 这个过程有点“混淆”,但基本上是明文的。
这里是将密钥分成37个种子,并通过使用以下XOR操作来计算密钥。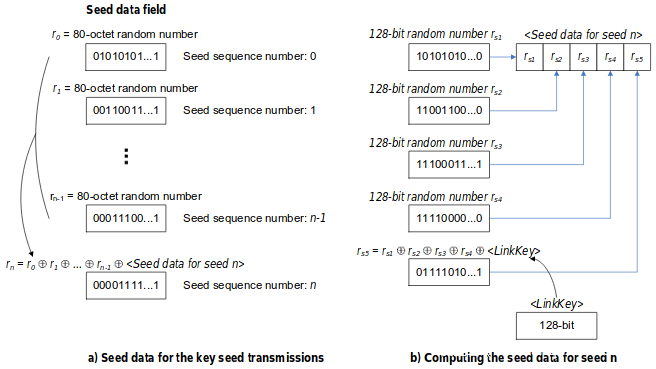
为了使攻击者更难以嗅探,传输关键种子的Zigbee数据包以非常低的输出功率发送。
不用说,这个密钥交换过程并不完美,它已经受到广泛的批评。不过,如果攻击者没有嗅探到配对过程,那么AES-128-CCM *就没什么重大问题。
在我们的远程和STB的情况下,这种配对过程和密钥交换仅在STB的第一次启动期间发生过一次。
RF4CE 工具
- GNU Radio
- The IEEE 802.15.4 MAC and PHY layers are provided by the gr-ieee802-15-4 project
- HackRF
- PlutoSDR
PIC 缓冲区溢出
简介
因为注入RF4CE数据包是可能的,我开始fuzz STB。
我很快发现发送大的RF4CE数据帧有时会让PIC卡住甚至重置。
这显然像是一个缓冲区溢出。 但是如何利用PIC微控制器上的缓冲区溢出? 考虑到PIC仅用于基本功能,是否有什么“邪恶”来实现?
要回答这些问题,我首先必须介绍PIC Enhanced Midrange架构的基础知识。 已经熟悉它的读者可以随意跳过本节。 我将着重指出在这样的设备上“利用”缓冲区溢出的要点。
PIC Midrange架构
PIC Enhanced Midrange架构支持以14位编码的49条指令。
我不详细说明这些指令。
PIC Enhanced Midrange 是Harvard架构。 这意味着指令存储器与数据存储器分开。
PIC数据存储器分为几个128字节的存储区(bank)。 所有存储区具有相同的结构,详见下表。
| ADDRESS RANGE | MEMORY TYPE |
|---|---|
| 0x000 – 0x00b | Core Registers |
| 0x00c – 0x01f | Peripherals Registers |
| 0x020 – 0x06f | General Purpose Registers |
| 0x070 – 0x07f | Common RAM |
例如,我们从PIC中提取出来的数据表显示有四个存储区。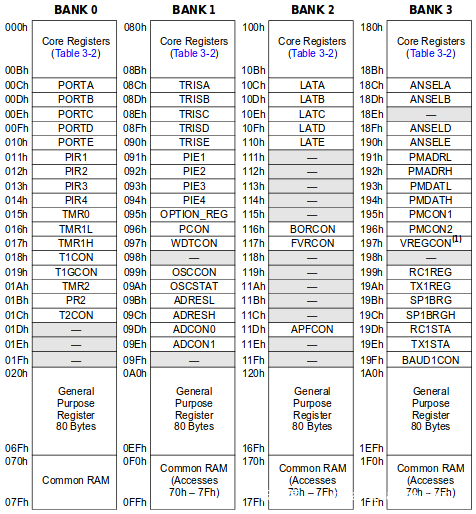
我们来详细看一下这些内存区域:
核心寄存器
核心寄存器都可以被存储区(bank)访问到:
| ADDRESS | REGISTER |
|---|---|
| 0x00 | INDF0 |
| 0x01 | INDF1 |
| 0x02 | PCL |
| 0x03 | STATUS |
| 0x04 | FSR0L |
| 0x05 | FSR0H |
| 0x06 | FSR1L |
| 0x07 | FSR1H |
| 0x08 | BSR |
| 0x09 | WREG |
| 0x0a | PCLATH |
| 0x0b | INTCON |
INDFn,FSRnL和FSRnH寄存器用于间接寻址。 这将在以下几节中解释。
PCL和PCLATH用于存储程序计数器。 这两个寄存器对我们来说非常重要,并将在下一节详细介绍。
WREG寄存器是工作寄存器。 该寄存器被用作大多数算术和逻辑指令的操作数之一。
BSR寄存器是Bank Select Register。 存储在该寄存器中的值是当前选择的存储块的索引。 让我们来看看下面的代码来理解它的含义。
0x00000000 2000 movlb 0x0
0x00000001 1008 movf 0x10, w
第一条指令将BSR的值设置为0x00,这意味着选择了Bank 0。 第二条指令从内存加载一个字节到WREG。 在选择Bank 0时,加载寄存器PORTE对应的值。
0x00000000 2002 movlb 0x2
0x00000001 1008 movf 0x10, w
这里就用到了选用的存储区2,也就是说LATE的值会被用到。
外设寄存器
外设寄存器用于和PIC的外设硬件交互,比如说,UART,SPI或者GPIO都是通过它来控制读写的。
通用寄存器
就用来读写数据。
通用RAM寄存器
就跟上面一样,它用于读写RAM的数据,这里的内存区域和所有的Bank是一样的。它不受BSR的影响。
PCL和PCLATH寄存器
PCL存储程序计数器的LSB,而PCLATH存储MSB。 可以直接写入这些寄存器。 让我们来看看以下内容。
0x00000000 8831 movlp 0x8
0x00000001 4230 movlw 0x42
0x00000002 8200 movwf PCL
第一条指令将PCLATH寄存器加载到0x08。 这不会改变程序的执行流程,下面的指令继续执行,WREG设置为0x42。 最后,PCL设为WREG的值。
当以这种方式改变PCL时,将根据PCL和PCLATH的值修改执行流程。 在这种情况下,PIC将跳转到位于ad 0x0842的指令。
PIC 缓冲区溢出漏洞利用
PIC和平常的ARM、x86、mips的二进制漏洞不太一样。因为他是Harvard架构,代码和数据在不同的地址空间里,打shellcode的方式就不行了。
而且PIC16F1527的调用栈的方式不在数据内存中。调用栈是用硬件实现的,也就没法从内存里找到它的地址。这里exploit不能用覆盖返回地址的方式实现了。
为了更好的理解程序,我们要从底层看RF4CE从SPI的CC2534收到的payload数据。如果检查之前一节讲到的SPI帧,我们需要关注的是DATA段
| LENGTH | CMD0 | CMD1 | SRCINDEX | PROFILEID | VENDORID | RXLQI | RXFLAGS | LEN | DATA |
|---|---|---|---|---|---|---|---|---|---|
| 0x09 | 0x4a | 0x05 | 0x00 | 0x01 | 0x0000 | 0x94 | 0x01 | 0x02 | 0x0201 |
下表给出了相关内存空间调用的函数:
| ADDRESS / REGISTER | VALUE |
|---|---|
| 0x032 | RF4CE Frame Payload Size |
| WREG | 0xAA |
| PCLATH | 0x03 |
| BSR | 0x00 |

我们一步一步来看:
- 首先,值WREG存储在地址0x033(bank 0,偏移0x33)。该值实际上是指向数据缓冲区的指针的LSB字节,用于存储RF4CE有效载荷。
- 接下来,进入主循环。存储在0x033的RF4CE帧有效负载大小变量减少,并且检查是否能够接收更多的数据。 RF4CE帧有效载荷大小的值是该函数的参数。它已通过接收由CC2534发送的SPI数据的第一个字节进行检索。正如所料,不对此值边界进行检查。
- 数据字节通过使用间接寻址方法从从0x3AA开始的地址获取。接下来将该字节装入SSP2BUS外设寄存器。
- 一旦写入该寄存器,SPI传输开始。轮询SSP2STAT以等待传输结束。
- 传输结束后,接收到的字节从SSP2BUS中获取。该字节通过间接寻址存储到数据缓冲区。
- 最后,0x033处的字节(指向数据缓冲区的指针的LSB)增加。
下图演示RF4CEpayload过大时发生的情况: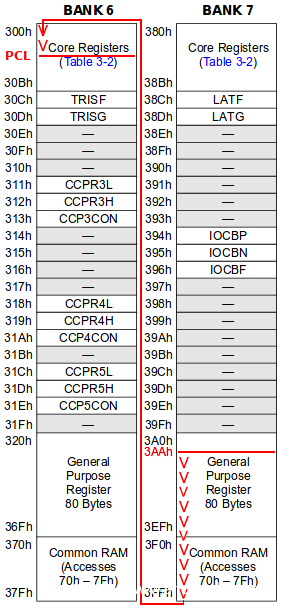
数据指针到达0x03ff后,溢出到0x0300(因为只有LSB实际增加)并且数据被写入到核心寄存器(Core Registers)。当PCL核心寄存器被覆盖时,执行流程被重定向。就用这个原理利用漏洞!
尽管如此,我们所能操作的空间仍然相当有限。我们只能控制程序计数器的LSB。 MSB不能被更改,并且由PCLATH寄存器设置为0x03。
因此,我们可以跳转到的地址,从0x300到0x3ff。
溢出利用
正如之前所写,MCU连接到了UI板上,并且能实时的响应按钮。这包含了WPS按钮。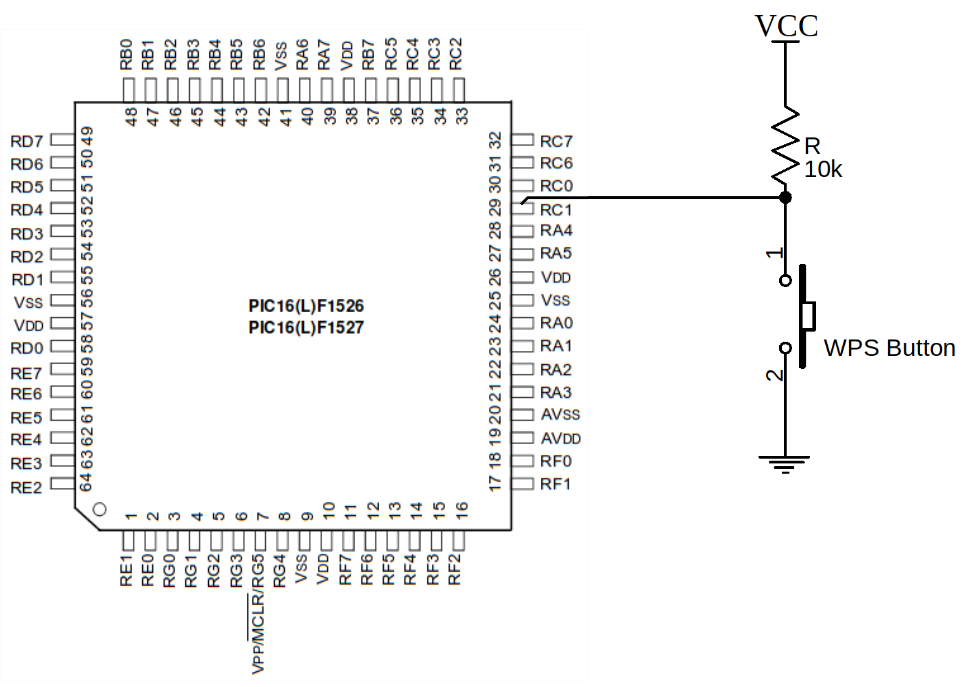
这很直接,如果按钮按下,连接到PIC的GPIO RC1与VCC连通,产生一个高电平。只要按钮按下,引脚接地,产生低电平。
在固件方面,处理这样的输入可能会有两种方式:中断,或者记录GPIO的状态。此处用的是第一个。
在主循环的每一次迭代中,固件都会检查RC1输入的状态。 这是通过读取外设寄存器PORTC并检查位1是否置1来完成的。 按钮未按下时,该位为’1’,按下按钮,该位置’0’。
这里,RC1被配置为输入。 可以通过不设置TRISC外设寄存器的1位将其配置为输出。 如果我们设置了这个位,即使没有按下按钮,PORTC也会变为’0’。 TRISC的值由启动时的固件配置,并且只做一次。
这个很有用,因为这意味着如果我们能够翻转TRISC寄存器第1位的方法,固件实际上会按照WPS按钮按下来响应!
我发现一个RF4CE的payload可以搞定。 再次说明,它只能用在这个固件版本上,但并不意味着其他固件不可被利用,因为还是可能有缓冲区溢出的。
从图上可以看到payload。
我已经把它分解成了几个段: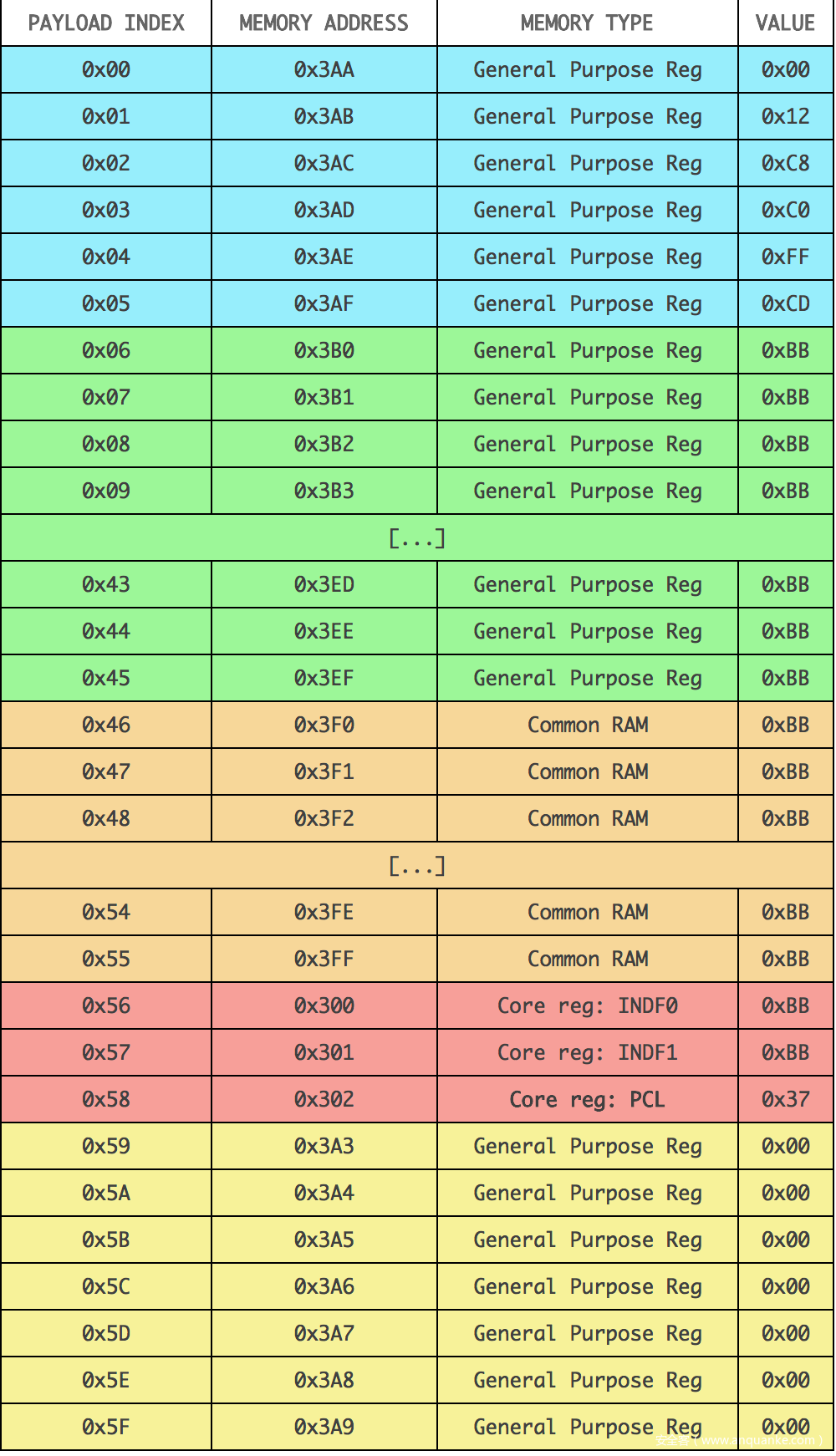
第一部分,索引范围从0x00到0x05包含了一些现在还没法解释的值,但你应该很快就会参透。 这些值写入预期的内存地址,从0x3AA开始。
接下来,范围从0x06到0x45是padding。 这里的就是用与增加数据缓冲区指针的值。
从0x46开始溢出。 数据现在写入公用RAM(Common RAM)。 实际上没啥用。 填充字节仍被使用。
从索引0x56开始,才是最重要的。 核心寄存器(Core Register)最终被覆盖。 PCL寄存器被设置为0x37。 由于在SPI_transmit函数的上下文中PCLATH寄存器等于0x03,PIC将跳转到位于0x0337的指令。
指令地址如下:
0x00000336 9231 movlp 0x12
>>>>> 0x00000337 b822 call 0x2b8 ;should call 0x12b8 when pclath=0x12
0x00000338 8331 movlp 0x3
有个函数调用。 不过,要跳转到有效函数的开头,PCLATH寄存器应该设为0x12。 对我们来说,它仍等于0x03。 这意味着PIC将实际上跳转到另一个函数中间的完全不同的地址。
从这里起,PIC将执行数十次指令,并且几次跳转。 幸运的是,执行所有这些指令没有明显的副作用。 最后,执行下面的一段代码。
```
0x000012a3 a500 movwf 0x25
0x000012a4 a030 movlw 0xa0
0x000012a5 4226 call 0x642 ;Read some more data from SPI bus
0x000012a6 9231 movlp 0x12
0x000012a7 3f08 movf 0x3f, w
0x000012a8 b200 movwf 0x32 ;dest_low
0x000012a9 a430 movlw 0xa4
0x000012aa b301 clr 0x33, f ;dest_high
0x000012ab b400 movwf 0x34 ;src_low
0x000012ac 0330 movlw 0x3
0x000012ad b500 movwf 0x35 ;src_high
0x000012ae 3e08 movf 0x3e, w ;size
0x000012af b600 movwf 0x36
0x000012b0 b701 clr 0x37, f
0x000012b1 d726 call 0x6d7 ;"memcpy"
0x000012b2 2700 movlb 0x7
0x000012b3 2308 movf 0x23, w
0x000012b4 0800 return
```
首先调用从SPI总线读取更多字节的一段代码。固定数量的7个字节将在0x3a3开始的地址处被读取和写入(这个代码实际上是一开始就读取由CC2534发送的SPI数据的)。
接下来,对memcpy函数进行一个有意思的调用。
源地址设为0x3a4。如果仔细观察前面的表格,会看到可以控制的从0x3a4开始的大量数据。
目标地址的MSB被设置为0x00,而我发现从地址0x32开始的低字节等于0x83。
运气很好,size参数也可以控制。因为一个我没怎么去解释的原因,这个参数被加载了之前发送的RF4CE数据包的一个字节。例如,在发送exploit溢出的包之前发送像0c0c0c0c0c0c0c0c0c0c0c0c0c的数据,保证size参数被加载的值是0x0c。
下表总结了memcpy的功能:
你可以看到,多个核心寄存器(Core Register)能被控制m,这些字节的payload index从0x00到0x05、0x5a到0x5f。
为了保证程序能继续执行,要特别注意PCLATH和INTCON的值。TRISA和TRISB设为和之前一样的值,相反,TRISC更改为模拟WPS按钮按下。
可以通过将TRISC的1位设置为’1’并使用类似的payload完成“按钮释放”。
通过使用所有这些知识,恶意用户可以访问受保护的WiFi网络。
在修补漏洞之前,可能会出现以下情况。
- 当受害者使用STB的遥控器时,攻击者嗅探RF4CE数据包。 尽管这些数据包的payload被加密,但足以注入特定的数据包。
- 攻击者发送旨在模拟WPS按钮按下的有效载荷。
- 攻击者发送一个类似的有效载荷,模拟WPS按钮释放。
- PIC固件被欺骗,认为WPS按钮已被物理按下。 它通知该事件的系统的网关部分。 WPS开始发现WiFi。
- 因为可以控制WPS,攻击者可以将自己的设备连接到受害者的WiFi网络。
总结
STB上运行的Linux系统看起来像是设计时真的考虑了安全性:使用了加固的二进制文件,隔离由LXC容器执行,…
尽管如此,因为看起来像是一个不和安全非常相关的子系统的两个漏洞,实际上可以远程触发WPS进程。
在发现设备的时候,最后一个PIC固件受到缓冲区溢出的影响,但我没有找到利用它的办法。 PoC只能在之前的修订版本中实现。 尽管如此,一个铁了心要打的攻击者可能在等另一个可能可以利用这个洞的PIC固件版本发布。 所以向厂商披露漏洞还是很重要。
如今修复已经完成,PIC固件已在数月前迅速修补并部署。 所幸,这些漏洞如今已经不能再被利用了。





发表评论
您还未登录,请先登录。
登录